Written by Fabio Gallo / AI4IV s.r.l. / Published on March 02, 2026
As artificial intelligence moves beyond the digital domain and into the physical world, vision is emerging as a critical layer of industrial infrastructure. Physical AI systems embed intelligence directly into machines that sense, decide, and act in real environments, making perception a decisive factor for performance, safety, and scalability. In this context, vision is no longer a supporting function, but a foundational capability upon which real-world AI systems are built.
Unlike purely digital AI systems, Physical AI must operate continuously across changing environments, lighting conditions, and operational contexts that cannot be fully anticipated at design time. Its success is therefore measured not only in accuracy benchmarks, but in robustness, uptime, and the ability to generalize reliably beyond curated datasets.
When AI enters the physical world
For decades, artificial intelligence evolved primarily within digital environments. Algorithms processed static datasets,
produced probabilistic outputs, and operated at a comfortable distance from the physical world. Errors could often be corrected offline or tolerated without immediate consequences.
Today, AI is increasingly embedded in machines that operate directly in the physical world, from autonomous vehicles and
industrial robots to inspection drones and intelligent devices. This transition defines the emergence of Physical AI.
In this transition, the cost of perceptual error changes fundamentally. Decisions are no longer abstract predictions but physical actions, executed in real time and often in proximity to people, infrastructure, or valuable assets. As a result, perception becomes a system-level concern rather than a modular component.
In Physical AI systems, decisions translate directly into physical actions. Misinterpretations can result in safety risks, equipment damage, or loss of trust. As a result, the quality, consistency, and reliability of sensory input become determining factors for overall system performance.
When vision becomes infrastructure
Vision serves as the primary interface between Physical AI systems and the external world. Visual data feeds automated decision chains that guide navigation, manipulation, inspection, and interaction. While other sensors provide complementary signals, vision offers the richest and most flexible representation of complex environments.
Much like communication networks or energy grids, vision defines the operational envelope of Physical AI systems. It determines where they can function, under which conditions, and with what safety margins. Limitations at the perception layer constrain the entire system, regardless of the sophistication of downstream algorithms.
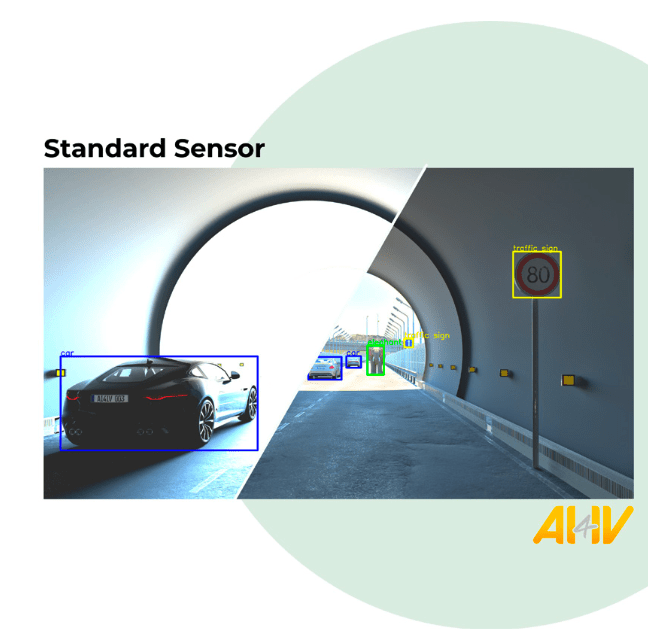
Standard CMOS image sensors were designed primarily for human observers. They rely on uniform pixel arrays, global
exposure parameters, and downstream image processing pipelines to reconstruct scenes. While effective for photography and video, this approach introduces structural limitations in autonomous and safety-critical systems.
In scenarios involving extreme lighting contrasts, such as a vehicle exiting a tunnel into bright sunlight, a robot operating near reflective metallic surfaces, or a surveillance camera facing low-angle glare, traditional sensors may saturate parts of the image or lose critical detail. Although such artifacts may be acceptable to human viewers, they can prevent neural networks from correctly classifying objects, detecting obstacles, or understanding scene context.
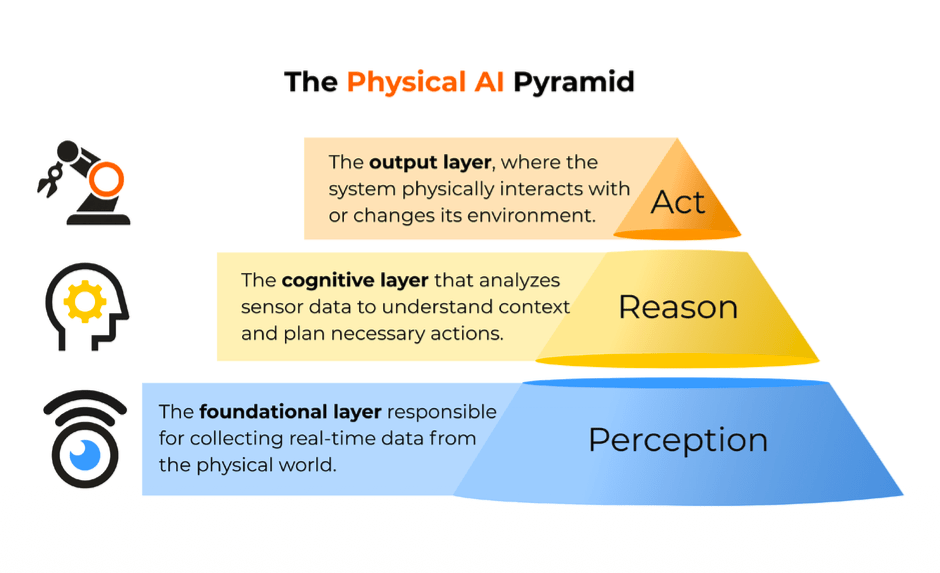
Physical AI can be understood as a layered architecture in which perception forms the foundation for reasoning and action.
If perception is compromised at the base, errors propagate upward and no amount of downstream intelligence can fully
compensate. Vision therefore acquires the role of industrial infrastructure, defining the operational envelope of Physical AI
systems.
Impact across physical AI applications
The importance of robust visual perception becomes evident across a wide range of Physical AI applications. While operational contexts differ, similar sensing challenges recur across domains, highlighting the systemic nature of the problem.
Despite the diversity of these domains, they share a common constraint: perception must remain reliable under conditions that are difficult to model exhaustively. Improving sensing quality at the source therefore has a disproportionate impact, simplifying system design and enabling scalable deployment across environments.
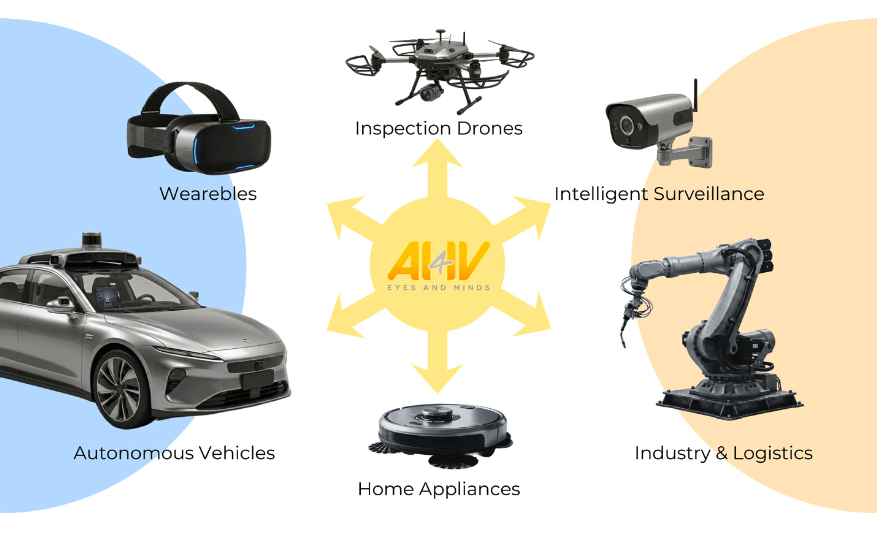
In autonomous mobility, vision systems must cope with rapidly changing illumination, shadows, headlights, and reflective surfaces. A pedestrian partially obscured by glare or deep shadow may be missed by a perception system relying on conventional image reconstruction, leading to incorrect or delayed decisions.
In industrial robotics and logistics, visual sensing is used for object detection, pose estimation, and quality inspection.
Variations in surface reflectivity, ambient lighting, or background clutter can lead to misclassification or false rejections, reducing throughput and reliability.
Inspection drones face similar challenges when operating near infrastructure such as bridges, power lines, or industrial plants, where strong contrasts between sky, structure, and shadow are common. In consumer environments, wearable devices and smart appliances increasingly rely on vision to adapt their behavior to users and surroundings.
Across these applications, advances in sensing quality have a disproportionate impact on system robustness and scalability. Improving perception at the source simplifies downstream processing and expands the set of environments in which Physical AI systems can operate reliably.
Rethinking image acquisition
Meeting the demands of Physical AI requires rethinking image acquisition at the sensor level. Incremental improvements to conventional architectures struggle to overcome fundamental limitations in dynamic range, latency, and artifact-free capture.
While advances in image signal processing and neural training have extended the usefulness of conventional sensors, they
cannot fully compensate for information that is lost or distorted at the moment of capture. Addressing these limitations requires architectural change rather than further optimization of existing pipelines.
AI4IV’s FlyEye technology adopts a bio- inspired approach, drawing inspiration from compound eyes found in nature. Rather than operating as a monolithic pixel array, the sensor is structured as an array of autonomous photoreceptors.
Each photoreceptor comprises a small group of pixels that independently adapts its acquisition parameters, such as sensitivity and integration time, based on local light intensity. This local adaptation enables the sensor to capture detail simultaneously in bright and dark regions of a scene, without relying on multi-exposure reconstruction or aggressive post-processing.
By performing adaptation directly at the sensing stage, FlyEye produces clean, information-rich visual data that is inherently well suited for downstream AI processing.
From sensing to edge intelligence
As Physical AI systems evolve, the boundary between sensing and computation becomes increasingly blurred. Relying on cloud-based processing introduces latency, bandwidth requirements, and security concerns that are incompatible with many real-time or safety- critical applications.
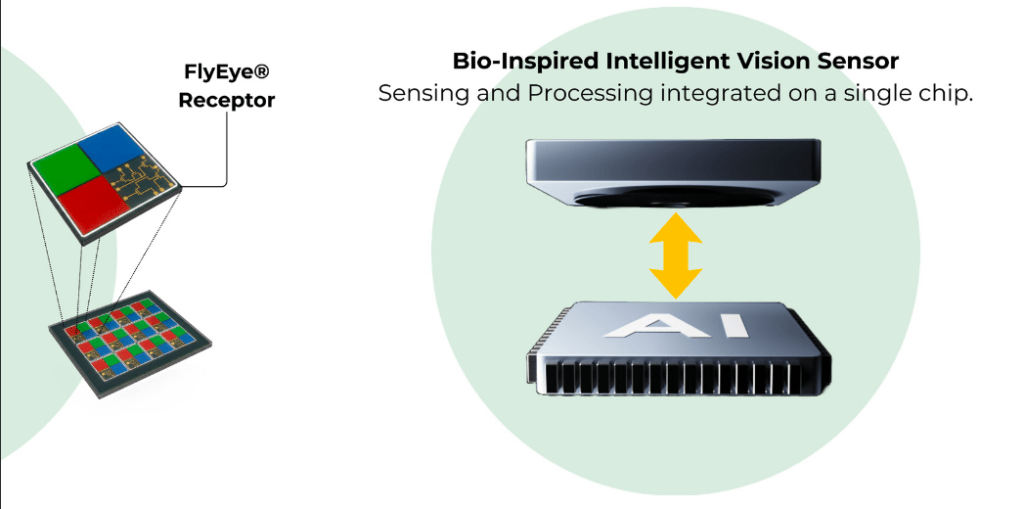
On-chip processing enables edge sensors to perform neural network inference locally, without the need for a continuous network connection. This reduces end-to-end latency, improves robustness in disconnected environments, and strengthens data security by keeping visual information at the source.
Edge intelligence allows perception and reasoning to operate as a closed loop. Inference results can influence acquisition
strategies in real time, focussing sensing resources where they are most needed and improving robustness under challenging conditions. This convergence is a key enabler of autonomous, energy-efficient systems.
AI4IV addresses this challenge through Tensputing, a neural processing architecture designed for efficient tensor-based inference and compact silicon implementation. By integrating computation close to the sensor, Tensputing enables fast decision-making. Crucially, on-chip intelligence can also steer image acquisition itself. Inference results may feed back into the sensing loop, dynamically adjusting acquisition parameters at the photoreceptor level. This tight coupling further
enhances robustness.
Conclusion
As artificial intelligence continues its transition into the physical world, vision will increasingly define system performance, safety, and scalability. Bio-inspired sensor architectures combined with on-chip intelligence support a new generation of Physical AI systems.
For Europe’s industrial ecosystem, advances in bio-inspired sensing and edge intelligence represent an opportunity to strengthen technological autonomy and enable new classes of intelligent systems. By rethinking perception as infrastructure, Physical AI can move from controlled demonstrations to reliable deployment at scale.